
道路上で”実験し放題”!? 新東名「未開通区間」で最先端技術が誕生中! 「自動運転しやすい道路」めざして「路車協調」実験現場が公開
新東名高速道路の未開通区間を利用した自動運転技術の実証実験が報道され、路車協調実験が行われている。
実験では10社が協力して10項目のユースケースを検証し、高速道路上での自動運転をサポートする技術が試されている。
具体的には車線上の停止車情報の共有や遠隔操作による障害物回避などが行われ、通信技術を活用して課題を解決する取り組みも進められている。
新東名建設現場を利用しての実証実験は日本初であり、自動運転技術とインフラの連携による安全性向上が試みられている。
公開されたユースケース1やユースケース4では、停止車情報の共有や遠隔操作によるクルマの遠隔操縦が行われ、課題としての通信遅延にも取り組まれている。
政府が自動運転サービス支援道の全国展開や2025年度までの全国自動運転の通年運行の目標を掲げる中、道路上での実証実験が技術発展と安全性向上に寄与する取り組みである。
開通前の新東名高速道路の区間を利用して、自動運転の先端技術を実験する試みが行われています。
今回、その実験の様子が報道陣に公開されました。いったいどのようなことを行っているのでしょうか。
今回行われているのは「高速道路の自動運転時代に向けた路車協調実証実験」です。10社が参画し、協働して計10項目のユースケースを実証実験しています。
実際の路上での自動運転の試験は、なかなかできるものではありません。まとまった距離を複数車線にわたって実験のために占用すると、交通にも影響します。
しかし、丁度いいところに、新東名の建設現場を使うことができるというわけです。新東名は新秦野~新御殿場の約25kmが未開通で、ここさえ完成すれば全通というところまできています。開通予定は2027年度と発表されています。
高速道路の未開通部で路車協調の実証実験をおこなうケースは、国内初といいます。
路車協調というのは、クルマ自身が周囲の情報を元に適切に動く「自動運転」から発展し、「自動運転を周囲のインフラがサポートする」というコンセプトです。
自動運転の技術がまだ発展途上にあるなか、通信技術によって諸々の課題を解決しようとしています。
さて、2024年6月20日に、静岡県小山町のPR館前で公開されたのが、「ユースケース1」「ユースケース4」の2つです。
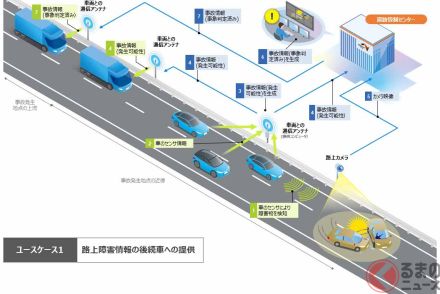
ユースケース1は、車線上にクルマが停止した場合、その情報を後ろのトラックへ伝達し、自動的に減速と車線変更を行うもの。ユースケース4は、路上の障害物の手前で停止したクルマを、運転手ではなく管制センターから遠隔操作して、障害物をよけて脱出するというものです。
前者は、路側に立てられたアンテナを介し、停止車から停止情報を受け取り、後続車へその情報が送られます。あとはその情報をもとに、トラックが判断して回避行動を取るというわけです。
後者は、KDDIのモバイル回線を使って、遠隔のバーチャル運転席の操縦情報と、現地車の動きならびに車窓風景を同期させる仕組みです。
実際に目の前で「遠隔ドライバー」のハンドルさばきによって、離れた場所のクルマがうまく障害物を避ける様子を見ることができました。
一番の課題がやはり「通信による遅延」だといい、ハンドルの動きと現地の状況は、ほんの少しながら往復ずつでタイムラグが発生します。担当者は「タイムラグをできるだけ小さくするほか、センシングなどタイムラグをサポートする補助情報で、うまく遠隔操縦ができるようにしている」と話します。
折しも、国が「経済財政運営と改革の基本方針(骨太の方針)2024」にて「今後10年で『自動運転サービス支援道』を全国で展開する」「2025年度には全国で自動運転の通年運行を実現する」といった計画を発表したばかりです。NEXCO中日本 経営企画部の前川 利聡 部長は「自動運転車の路車協調については、このように道路上で実証実験を行えたこと自体が有意義と言えます。クルマの技術として認識されていた自動運転を、道路の技術で支援して安全・安心を高められるよう、こういった取り組みをおこなっています」と話しました。




















