イタリアで「リアル鉄腕アトム」開発中 災害の現場へ飛行し、生存者を捜索する人型ロボット
イタリアで開発されているヒューマノイドロボットiRonCubは、災害現場での活動に向けて飛行能力を持つように改良されている。
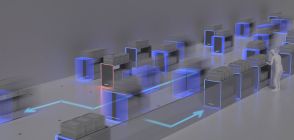
ロボットはジェットパックを取り付けられ、地上で歩行するだけでなく、空中飛行も可能となっている。
現在は安定した飛行や離着陸制御などの開発に取り組んでおり、将来的には生存者捜索救助などに活用されることが期待されている。

「鉄腕アトム」のような人型ロボットが災害の現場に助けに来てくれる―そんな時代がもうすぐ来るかもしれない。イタリアで、飛行方法を学習し災害発生時に活躍するヒューマノイドロボットの開発が進められている。
イタリア技術研究所のチームは、すでに「iCub」という二足歩行ロボットを開発、販売している。そして次に、このロボットを空に飛ばせることはできないかと考えた。
飛行を可能にするため両腕と両肩にジェットタービンを取り付け、名前を「iRonCub」に変更した。
同研究所の人工知能・機械知能部門の責任者であるダニエル・プッチさんは、このロボットにジェットパックを追加することは、決して小さな調整作業ではないと話す。
イタリア技術研究所 ダニエル・プッチさん
「ジェットパックも下半身もすべて作り直さなければならなかった。800℃の排気ガスが超音速で排出されることを覚えておかなけばならない。そこで2つの問題が起こる。超音速の排気ガスは、接触するものすべてを溶かしてしまう。そのため、特別な保護装置を作らなければならなかった」
プッチさんはiRonCubが、人が近づくには危険な場所や立ち入りが困難な場所での捜索救助活動ができるようになることを期待しているという。「歩いて目的にたどり着くことが困難な場合、飛行してがれきや障害物を避け、着陸して点検し、生存者を探すことが求められる。そして1つの建物でそれを終えたら、ロボットは飛び立って生存者を探しに他の建物へと移っていく」
だが試作品の完成までには、まだ長い道のりがある。チームでは現在、ロボットが安定した飛行を維持し、離着陸の制御を可能にするシステムの開発に取り組んでいる。また飛行から着陸、さらに歩行へと移行させるのも難しいという。
だが研究チームは、この革新的な研究とその過程で収集される貴重なデータが、ヒューマノイドロボットの能力に革命をもたらし、人命救助への活用の可能性を広げることを期待している。