MIT、軟体ロボットシミュレータ「DittoGym」開発。由来はメタモン
AI要約
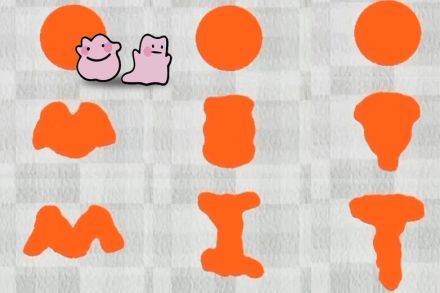
ソフトロボットの研究は進化中で、スライムのように形状を変化させられるロボットが注目されている。
マサチューセッツ工科大学(MIT)の研究チームは新たな制御アルゴリズムを開発し、ソフトロボットの柔軟な形状変化を実現する試みを行っている。
研究者らは、多様なタスクにおいてソフトロボットの強化学習を効率的に行い、汎用ロボットの可能性を示唆している。
ソフトロボットの研究は進化中で、スライムのように形状を変化させられるロボットが注目されている。
マサチューセッツ工科大学(MIT)の研究チームは新たな制御アルゴリズムを開発し、ソフトロボットの柔軟な形状変化を実現する試みを行っている。
研究者らは、多様なタスクにおいてソフトロボットの強化学習を効率的に行い、汎用ロボットの可能性を示唆している。

ALS患者も脳波で「握手」…ロボットやICTで「人間拡張」、未来へ大きな希望

AIが完成すれば人は何をすべきか? 「遊んで暮らせる」のか?
「自動物流道路」整備へ実験線 技術開発の場、国交省

BMW英国工場に米企業の4足歩行ロボット 工場内の作業や監視に威力
デキる高校生の「書かずに覚える」暗記術 定着のカギは「一度忘れて、思い出す」

スマホがなくなる日、何していたい? Apple Vision Proが民主化した日の話

未来はすでにここにある――コンサート『2024スターレイルLIVE』にみた“ものづくり”の極致
スーパーコンピューター「富岳」が「HPCG」「Graph500」で首位を維持--理研がコメント

「富岳」が世界スパコンランキングで9期連続首位獲得。HPCGとGraph500の2部門

マイクロソフト、諜報機関向けのAIを極秘に開発していた(海外)

市役所の案内役は“自走型AIロボット” 自治体も人出不足で…愛媛県内で初の試み

韓国で何かと話題の「豚バラ焼肉」だが…ロボットが調理すれば外はカリッ、中はしっとり
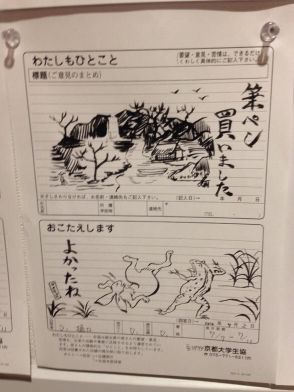
「壮大なドラマを観た」「エモさに浸ることしかできない」10年前に話題になった京大生協の“ひとことカード”の作者2人がついにSNSで出会う

スマホ時間、4人に1人が「急に長くなった」...大丈夫か? 「大半が楽しい時間」で問題ないが「メリハリつけて」と専門家
スケートボードやブレイキンで金の日本…骨折などけがは多い、安全対策はこれから
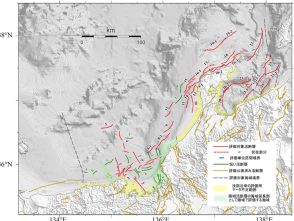
地震調査委、日本海に25カ所の活断層を指摘 最大M8級の大地震に備え前倒し公表

ポンプメーカーが作った普段使いのポータブル電源--バッテリーと発電機の技術を融合

暑い時期に増える痛風、ならないためにどうすればよい?
ところでWindows 10はいつまで使えるの? Windows 11への乗り換え方法は?

人は40代と60代に急激な老化に見舞われることがわかりました

29日から「超メルカリ市」、購入金額・販売手数料の最大全額が還元

ウエスタンデジタル、PlayStation5に「8TB」追加できるゲーミングドライブ

アップル「iPhone 16」9月10日発表か

Googleスマホ「Pixel 9」に熱問題の懸念寄せられる 同価格帯と比べ半分の性能スコアも報告